::Vídeo da soldagem de um tanque

Projeto, fabicação e montagem de um primeiro sistema de soldagem automatizada, 2 eixos lineares X e Y para testes conceituais.
Dimensionamento de motores DC para automação:
Levantamento dos esforços, cálculo de torque, levantamento de fornecedores e especificação de moto-redutores comerciais. A ideia inicial era utilizar moto-redutores DC de baixo custo, então foram buscados no mercado soluções bem simples que atendessem aos requisitos de esforços. Porém a equipe de projeto eletrônico achou por bem utilizar servo-motores DC com encoders, malha fechada. Desta forma, foi necessário redimensionar e buscar no mercado internacional novos fornecedores destes componentes.
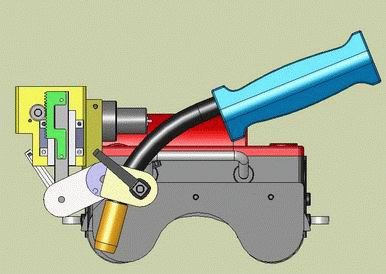
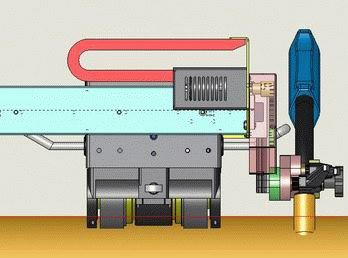
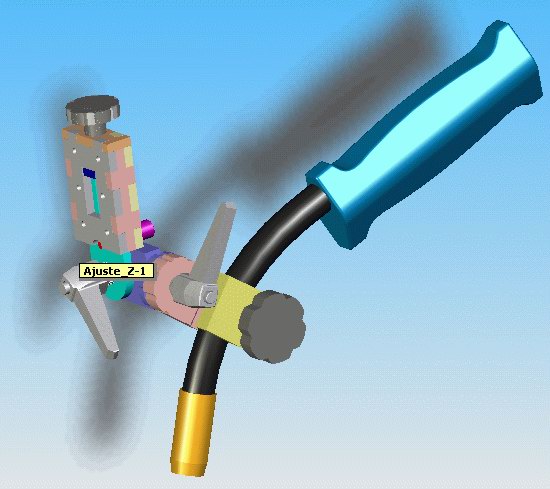
Projeto de um novo sistema de suporte da tocha de soldagem, que tenha os ajustes necessários para a devida operação do equipamento. Levar em consideração requisitos como rigidez, custo, ergonomia, confiabilidade, ajuste fino, durabilidade.

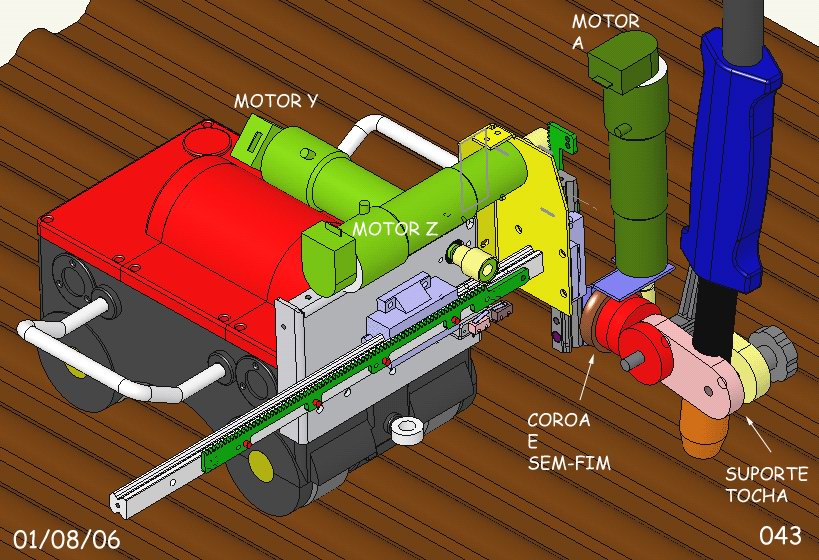
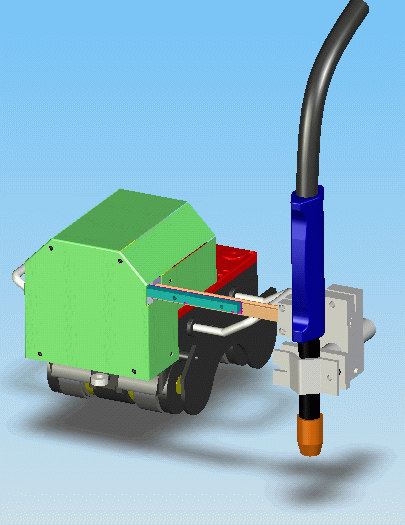
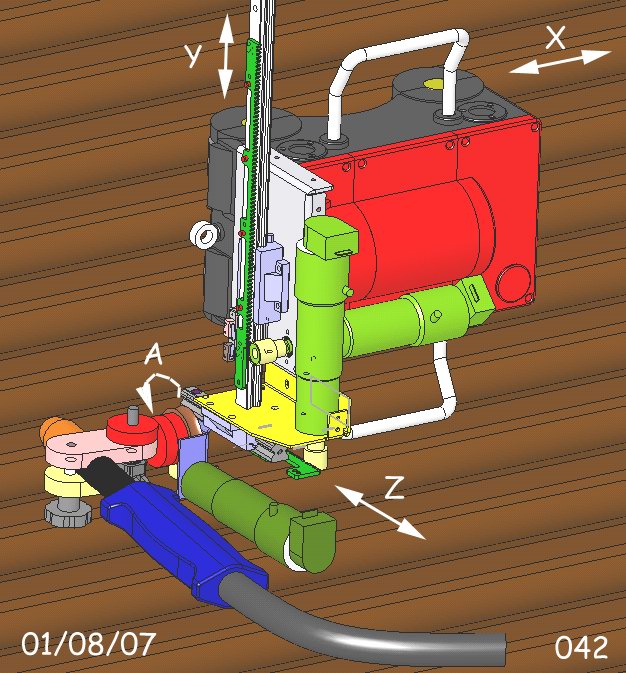
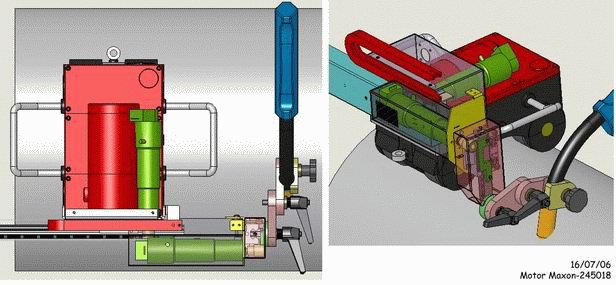
Projeto de um sistema automatizado de soldagem composto de 3 eixos lineares– X, Y, Z, e um eixo angular – A , junto a tocha. Um grande problema visualizado inicialmente foi o grande tamanho dos servo-motores DC com redutores de engrenagens e encoders. Buscou-se no mercado soluções de custo não muito elevado que atendessem os requisitos de tamanho. Esse projeto encontra-se em desenvolvimento.
Projeto de um sistema que facilite a retirada do carro magnético quando estiver grudado na peça metálica (em avaliação).
Projeto de carenagens com boa resistência ao uso contínuo do equipamento em ambientes insalubres.
Projeto da cablagem que alimentará motores e sensores nos 4 eixos. Projeto do sistema de fim de curso e ‘Home’ para cada eixo (em andamento).